Bluetooth RC Car
Remote-Controlled Vehicle with Arduino & Bluetooth
Remote-Controlled Vehicle with Arduino & Bluetooth
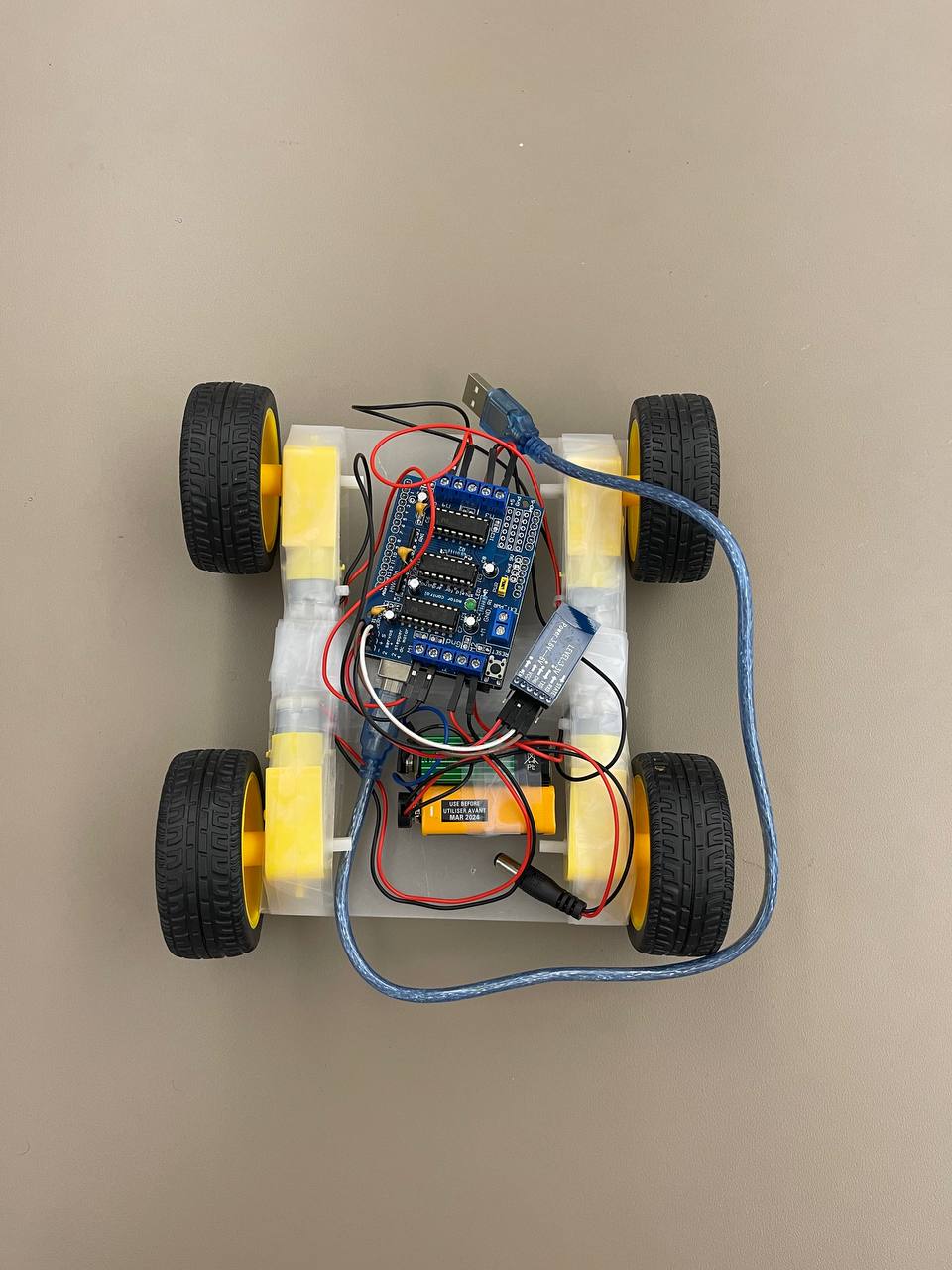
This project represents a hands-on engineering challenge that combines mechanical design, embedded systems programming, and wireless communication. I built a fully functional remote-controlled car from the ground up, implementing a robust four-motor drive system for precise movement and control.
The heart of the system is an Arduino microcontroller, which I programmed in C to handle all driving control logic. The code manages motor speed, direction, and coordination between the four motors to enable smooth forward, backward, turning, and diagonal movements. This required careful calibration and testing to ensure responsive and accurate control.
For wireless connectivity, I integrated an HC-05 Bluetooth module, allowing the car to be controlled remotely from a smartphone or computer. This wireless communication system enables real-time control with minimal latency, making the car responsive and fun to operate.
The project demonstrates practical skills in embedded systems, microcontroller programming, motor control, and wireless communication protocols. It showcases the integration of hardware and software to create a complete, functional system that bridges the gap between digital control and physical movement.